Ventus(承影):基于RVV的开源GPGPU
清华大学集成电路学院dsp-lab的承影RVV GPGPU设计文档。
整体目标
提供一个开源的基于RVV的GPGPU实现方案,并给出软件映射方案、指令集(支持的指令及特性、添加的自定义指令)和微架构实现。
软件任务调度及CTA实现方案
软件模型
无论采用何种指令集及微架构,GPU的编程模型是一样的。最基本的编程行为是,CPU(host)在特定的上下文(context)中,将对应的数据放入GPU内存,然后在GPU端唤起一个任务(kernel),GPU接收任务并执行,执行完成后将结果写回GPU内存,并返回CPU一个完成信号,CPU将数据搬回。
这个任务(kernel)在软件层面是按照grid、block、thread的层级下分的,每个kernel有一个grid,下面有若干个block,每个block有若干个warp。程序员对单个数据的操作抽象为一个thread,它是GPU的基本编程单位,程序员通过描述对一个thread的操作,并指定需要并行执行的block数、thread数,来完成并行编程的任务。
CTA任务分配
在硬件层面,将按照32个thread组成一个warp的形式,作为整体在SM硬件上进行调度。同一个block的warp只能在同一个SM上运行,但是同一SM可以可以容纳来自不同block甚至不同grid的若干个warp。
CPU发送给GPU的任务以block为基本单位,在我们的硬件上,block是单个任务单元,将由CTA scheduler接收,CTA scheduler会按block中包含的总warp数信息,以及需要占用的寄存器、local memory、sharedmemory大小,将block对应分配到空闲(即剩余资源足够)的SM上。(注意在rv架构下没做寄存器映射,因此默认分配32个标量寄存器和32个向量寄存器,下文有说明)
CTA scheduler以warp为单位逐个发送给SM,同一block的warp会分配到同一SM中,warp_slot_id的低位即表明了该warp在当前block中的id,高位表明了block所属的id。相应的,SM会通过此id,计算出当前warp在所属block中的位置,并将该值置于CSR寄存器中,供软件使用。分配的sharedmem baseaddr,global baseaddr,pc start,也是通过CSR读取的。
| name | addr | description |
|---|---|---|
| CSR_NUMW | 0x801 | 该block中的warp总数 |
| CSR_NUMT | 0x802 | 一个warp中的thread总数 |
| CSR_TID | 0x800 | 该warp对应的thread id,是NUMT的倍数 |
| CSR_WID | 0x805 | 该block中本warp对应的warp id |
| CSR_GDS | 0x807 | global memory的baseaddr ,在纯仿真中是shared memory的最大值 |
| CSR_LDS | 0x806 | 该block分配的shared memory的baseaddr |
汇编编程说明
目前Ventus没有配套的编译器,为实现针对上述硬件行为的额外操作,在汇编中需要手动插入这些指令:
- 需要通过 vid.v 与 csrrs CSR_TID 相加来获得thread各自的id
- 访存时预先读取 CSR_GDS和CSR_LDS作为数据基址
- 自定义指令的使用:
- predicate:我们在支持RVV定义的软件控制mask的同时,也支持用自定义指令来启动隐式的硬件predicate,详见自定义指令一节。
- warp运行结束时需要显式使用endprg指令。
- 同步目前仅支持同一block内warp间的全局同步。
其余行为与RVV编程一致。对于超过单组硬件处理能力长度的向量数据,支持使用RVV中定义的stripmining方式执行,默认单次处理num_thread个数据。与向量处理器不同的是,这时可以用SIMT-stack而非软件mask来实现,也可以在block大小允许时拆分为更多warp去调度。
以gaussian消元为例,将Ax=b中的A变为上三角矩阵:软件人员编程时,矩阵的每个元素都是预期以行为单位组织thread,计算时不同的行计算系数,相乘并减去,逐行处理完所有比自己行号小的行。循环的次数、相乘的位置由thread id决定。
指令集架构
RVV与GPGPU的结合
《量化研究方法》中提到了向量处理单元与多线程GPU在SIMD层面上的工作形式十分相似,向量处理器的车道与多线程SIMD的线程是相似的。区别在于通常GPGPU的硬件单元更多,chime(钟鸣)更短,向量处理器通过深度流水线化的访问来隐藏延迟,GPGPU则是通过同时多warp切换来隐藏延迟。因此在向量层面的操作上,RVV足以覆盖住GPGPU中的操作。此外,形如AMD和turing后的NV,提供了标量ALU,也是借鉴了向量处理器的方式。
因此,在RVV的基础上添加自定义的分支控制指令、线程同步指令、线程控制指令,就能实现GPGPU的功能。
为了最大限度的保留对RVV开源工具链的兼容性,我们对RVV中的大部分指令都进行了支持。少数不支持的指令包括:1. 涉及线程间数据交换的shuffle等指令,在GPGPU中线程间通常是独立操作,数据依赖需要用atomic或barrier显式操作 2. 向量寄存器长度和宽度变化的指令,GPGPU中几乎不会触及(少有的几条向量或者量化相关的功能会需要类似的功能) 3. 64bit相关的指令,在后续版本将支持。
在RVV的stripmining基础上添加warp级别并行,或许能在更优尺度上裁剪向量/SIMT指令,探索任务划分和调度空间。
寄存器设计
承影当前的寄存器堆实现方案为:单个SM上能同时承载的最大warp数为num_warp,每个warp由num_thread个线程组成。每个warp都有一套自己的寄存器,包括32个标量寄存器和32个向量寄存器,每个标量寄存器的宽度为32bit,每个向量寄存器的宽度为32*num_thread,并归属于各个thread私有。
虽然所用指令形式和意义相同,但区别于RVV,GPGPU中并不支持向量寄存器的长度和数量变化(长度固定为32bit,数量固定为num_thread),因此对于vsetvl系列指令,只有返回的剩余元素数量是有效的。
考虑到寄存器的实际使用,未额外规定浮点寄存器,需采用与zfinx扩展相同的方式管理。此外,由于长度为32bit,也不支持double相关的指令,以及64位相关的指令(即不支持rv64中wordlength=64bit的指令)。
地址映射
GPGPU中的物理地址空间包括sharedmem和globalmem,在PTX中每个地址都带有属性声明了其类型。
但在RV中没有该字段,加上目前没有设计MMU,因此承影目前的方案是用地址范围来区分sharedmem和globalmem。
所有SM共用一个4GB的全局地址空间,其中地址为0-128kB的字段将被映射到SM内部各自的sharedmem上,从global_baseaddr到4G的空间则映射到同一块ddr的相同地址上(即该部分使用物理地址)。而ddr中0-global_baseaddr的部分仅可以通过icache访问,可用于储存指令。
目前同步仅支持block内warp间同步,通过barrier实现。
支持的指令
目前承影支持RVV中的指令包括以下类型:
- 计算类,包括整数运算(加减、比较、移位、位运算、乘、乘加、除)、单精度浮点运算(加减、乘、乘加、除、整型转换、比较),支持带mask执行
- 访存类,包括三种访存模式,以及byte级读写,支持带mask执行
- mask类,包括比较及逻辑运算,但不包括vmsbf等涉及thread间通信的指令,也不支持gather等操作
对于改变向量位宽的指令暂不支持,但vsetl系列指令可以返回vl供stripmining使用。
RV32I中支持除ecall ebreak外的指令。由于目前没设计MMU,仅支持机器模式。
M F中支持32bit相关指令。
目前的自定义指令包括:
- predicate:我们在支持RVV定义的软件控制mask的同时,也支持用自定义指令来启动隐式的硬件predicate。启动的方式是使用自定义的vbeq系列线程分支指令,该指令会启动一个split,计算出当前分支的mask情形,并将else对应的mask压入SIMT-stack,然后带有mask执行if段,待if段末尾遇到join后再将else段及其对应mask出栈,待if段执行完成后合并恢复mask,分支结束。该过程可以嵌套。此外,如果分支计算出全走其中一条,将不会压栈并跳过另一条分支,带有branch divergence的for循环也可以用此机制实现。
- barrier:用该指令可以实现warp间的同步,每个遇到该barrier指令的warp都会等待,直到该block中所有未结束的warp都遇到此指令才会再次继续。
- endprg:warp运行结束时需要显式使用endprg指令。
微架构设计
CTA-scheduler
参考miaow的版本进行设计。CTA-scheduler记录了每个SM中寄存器和sharedmemory的使用情况,根据host发送的CTA信息,将CTA分配给剩余资源足够的SM并以warp为单位发送到SM上。整体结构由host-interface、pending-workgroup table、allocator、resource table、GPU interface组成,由Controller统一控制。
L1 cache
L1 向量数据缓存
写穿通,写不分配。非阻塞式cache,使用静态MSHR管理in-flight miss。向L2写回数据时对齐word。目前bank数量与流水线车道数量保持一致,未来支持可配置任意2的幂次。LSU发起的请求必须coalesce,即向量所有元素集中在一个cache line。使用多bank SRAM支持向量数据读写,两个所访问元素位于同一个SRAM bank时称为bank冲突。使用仲裁机制把请求分摊到多个周期返回。
指令缓存
只读标量缓存。非阻塞式cache(以支持大量warp的交替工作),使用类似的静态MSHR管理miss。
L2 cache
参考sifive的block-inclusive-cache进行设计。为便于观察写入结果,目前L2cache采用了write through策略。
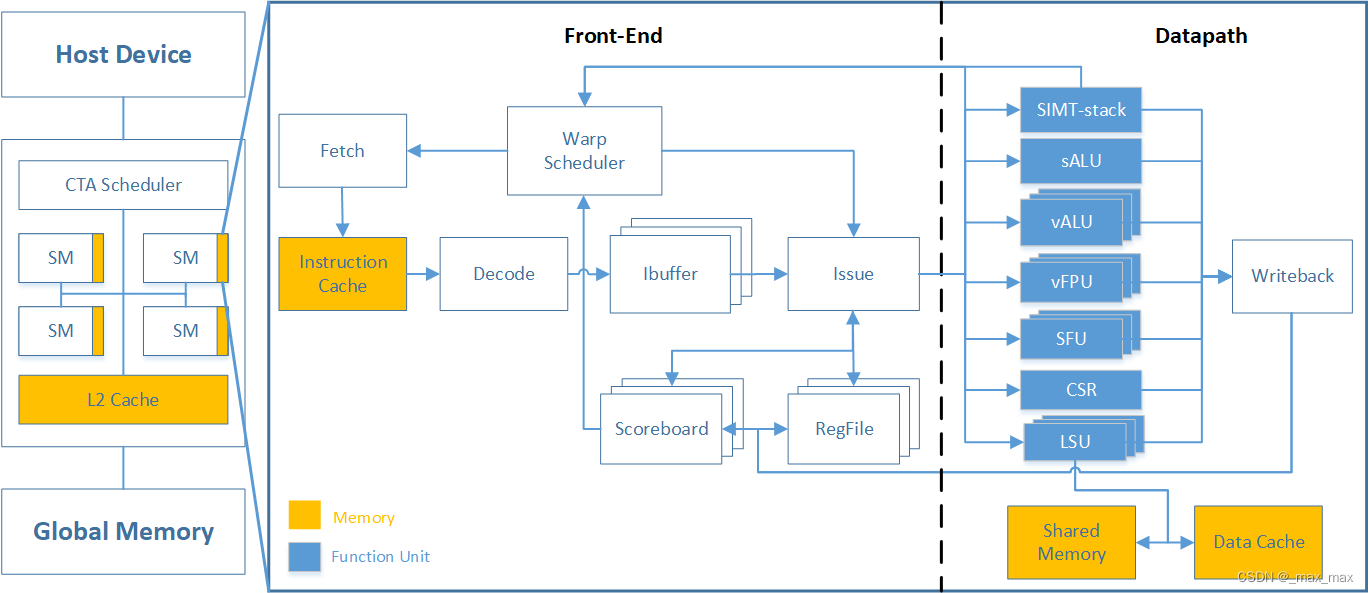
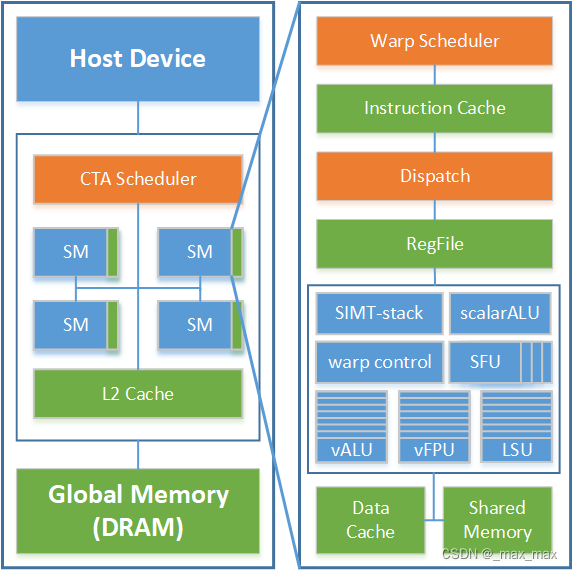
SM(streaming multiprocessor)
SM内部总体分为前端和后端,前端包括了取指、译码、指令缓冲、寄存器堆、发射、记分板、warp调度,后端包括了ALU、vALU、vFPU、LSU、SFU、CSR、SIMT-stack、warp控制等。涉及寄存器连接的模块间均采用握手机制传递信号。
warp调度
warp调度器主要的功能包括:
- 接收CTA调度器提供的warp的信息,分配warp所属的硬件单元并预设CSR寄存器值,激活该warp并标记所属的block信息。在warp执行完成后,将该信息返回给CTA调度器并释放对应硬件。
- 接收流水线发送的barrier指令信息,将指定的warp锁住直到其所属的block的所有活跃warp到达此barrier。
- 选择发给icache的warp,通常采用贪婪的策略,但当icache发生miss,或ibuffer已满时会将该warp的pc回退并切换到下一个warp发射。
- 选择发给执行单元的warp,通常采用轮询的策略,选择出当前指令缓冲有效、记分板未显示冲突、执行单元空闲的指令。切换warp仅需要一个周期。
取指
每个warp存储各自的pc,被选中送入icache的pc会+4,其余保留原值,遇到跳转时则替换为目标地址。
译码
icache命中的指令进行译码,译码器根据指令内容转换出对应的控制信号,并送入对应的指令缓冲中。
指令缓冲
指令缓冲是一系列的FIFO,每个warp有各自的ibuffer,接收译码后的输入并等待选中发射。
寄存器堆
不同于gpu中的设计,由于rv中指定了需要32个寄存器,因此目前的寄存器按照warp进行了分区,每个区域都是32个标量寄存器加32个向量寄存器。
标量寄存器提供至多三个读端口(乘加指令的三个操作数)与一个写端口(采用复制三份的单端口读写寄存器实现),向量寄存器提供至多四个读端口(三个源操作数与一个mask)与一个写端口,支持带mask的写入。
按照warp分区、单指令至多读4个寄存器也确保了读数时不会发生bank conflict。
发射
发射仲裁由warp调度器进行,被选中的控制信号与源操作数一起,依据识别其所需运算单元的类型,发送到对应运算单元执行。SIMT-stack相关指令需要同时用到vALU和SIMT-stack两个执行单元。
记分板
每个warp有各自的记分板,当一条指令发射成功后,所写入的寄存器将被记分板标记,下一条指令若会读写已被标记的寄存器,则不允许发射,直到指令执行完成记分板释放对应寄存器。
分支、线程分歧、跳转、barrier指令也会被锁住,只有这些指令完成判断且能继续顺序执行时才会释放。执行barrier期间,会同时清空除ibuffer外的流水线(属于该warp的部分);若发生跳转,会同时清空所有流水线(属于该warp的部分),此后记分板解除锁定。
写回
各个运算单元在输出级均有FIFO,等待写回寄存器的结果暂存在其中,由Arbiter选中后写回寄存器。写回标量寄存器与向量寄存器是完全独立的数据通路。
ALU
ALU中进行标量运算,包括warp间共用的数据,以及跳转控制等。
vALU
是单个ALU的复制,是核心的整型运算单元,供warp的多线程车道进行运算。目前一个周期完成一次请求,后续版本会修改功能单元数目,并采用与SFU相似的方式多周期执行。
vFPU
是核心的浮点运算单元,供warp的多线程车道进行运算。标量浮点运算也在此进行。
MUL
乘法运算单元,2个周期完成32bit乘法。
LSU
是核心的访存单元,会根据地址范围判断将读写请求发送给sharedmem或dcache(再由L1 dcache访问L2cache,再访问ddr即globalmemory)。
LSU中有MSHR形式的结构,可以一次存储和记录多个LSU请求,也会收集dcache和sharedmem返回的数据,集齐后再返回给流水线。
LSU中会完成strided及索引模式下向量地址的计算,并根据地址范围以cacheline为单位进行合并访问。最理想的情况(指地址连续且对齐cacheline)下一次访存即可取出单个warp所需结果。bank conflict由sharedmem和dcache自行处理。
在LSU中还会记录现有的访存请求信息,以实现fence指令。当遇到该指令后,会让所属warp的所有访存请求处理完成(读数据返回数据,写数据返回写响应)后再发送新的访存请求。
CSR
在warp启动时,对应的CSR会设置好应用程序所需的一些值,包括thread id等。vsetl也在此计算。其余与CSR的功能一致。
SFU
区别于PTX中提供的sin cos等函数,目前的SFU只支持了rv定义的整数除法取余、浮点除法、浮点平方根功能。本身运算就需要多周期完成,加上SFU中的运算单元数量少于lane数,因此如果未mask的线程较多时,chime会更长。
warp控制
barrier、endprg会发送给warp调度器处理。
SIMT-stack
SIMT stack的主要功能如下:维护分支嵌套控制流,保障程序运行的正确性;在实际没有分支分歧发生时,跳过不必要程序段的执行。
由SIMT-stack设置的隐式mask会在该warp执行过程中一直生效,直到有其它分支管理支持对其进行修改。该mask与RVV软件形式的mask可以叠加生效。
与分支管理相关的自定义扩展指令集有7条,其中6条为分支指令,1条为汇合指令,且if与else汇合的执行不同。以vbeq指令为例,需要完成的功能为:取源操作数vs2与vs1,valu模块对这两个向量寄存器中的元素一一进行比较,对于第i个元素,若vs2[i]=vs1[i],则计算结果out[i]为1,最终valu的输出结果out为分支指令对应的else路径掩码,同时译码模块将向分支管理模块发送分支发生标记以及else路径PC起始值PC branch。
整体微架构方案如图所示。